Work did not stop in the project “Development of innovative automotive testing and inspection competences in the West-Hungarian region based on the infrastructure of the Zalaegerszeg Automotive Test Track GINOP-2.3. 4-15-2020-00009”, in frame of the Széchenyi István University (https://admissions.sze.hu/welcome) part of the FT2 “Autonomous Near-
Earth Aerial Solutions” subproject – in cooperation with Institute for Computer Science and Control in Eötvös Loránd Research Network (www.sztaki.en) after the successful demonstration in fall last year (https://jkk-web.sze.hu/szes-drone-research-final-forerunner-
drone-demonstration-on-iv-zalazone-innovation-day/?lang=en) and conference presentation in December (https://www.gyorplusz.hu/gyor/dronok-segithetik-a-rendvedelmi-szervek-
kozlekedeset/). Processing of the collected data and utilization of the experiences happened during fall-winter leading to new developments such as:
- Tracking of the route of emergency vehicle onboard the vehicle and sending waypoints to the drone accordingly (until now this was implemented onboard the drone)
- Significant developments in ground vehicle position estimation and decision about the encounters leading to a journal publication [1]
- Developments in the ground vehicle tracking autopilot resulting in a conference paper which will be presented next week [2]
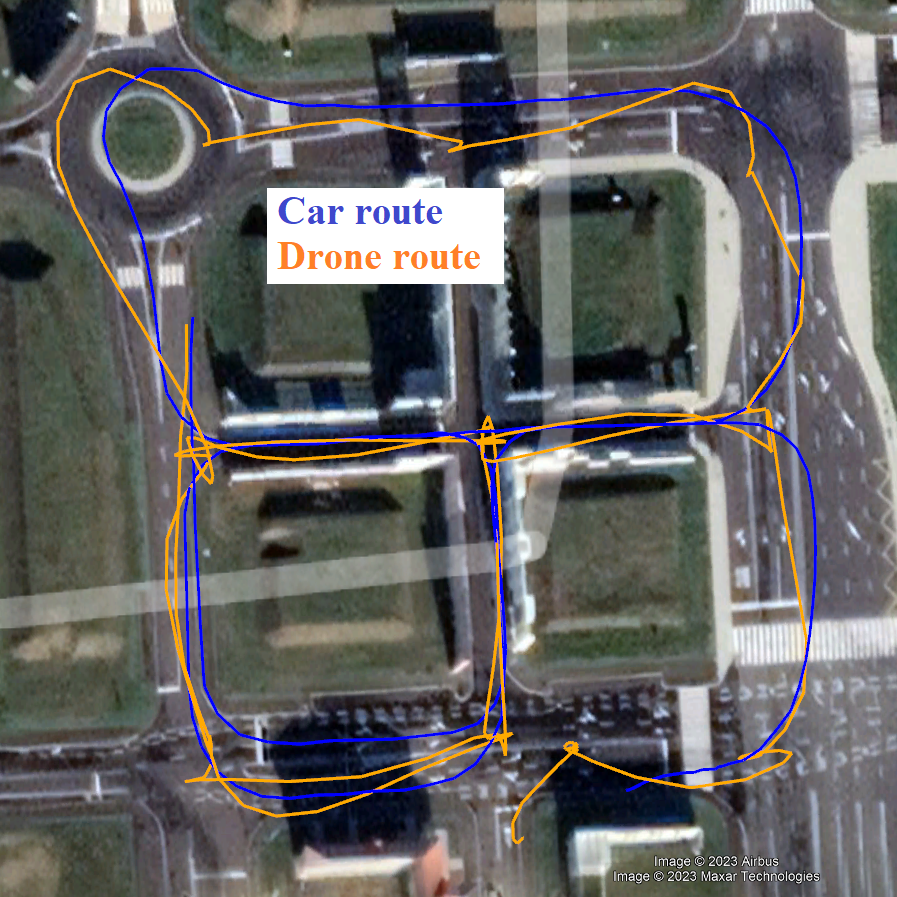
Real flight evaluation of these developments was done in the Smart City part of ZalaZONE proving ground between 22-23 June 2023. The picture shows the tracking of the ground vehicle driving on a free route while the video shows the performance of the complete improved system including own vehicle tracking and decision about the encounters.
[1] Bauer P, Hiba A, Nagy M, Simonyi E, Kuna G I, Kisari Á, Drotár I, Zarándy Á: Encounter Risk Evaluation with a Forerunner UAV, MDPI REMOTE SENSING Vol. 15 : Issue 6 Paper: 1512 , 45 p. (2023) https://www.mdpi.com/2072-4292/15/6/1512
[2] Bauer P, Nagy M, Kuna G I, Kisari A, Simonyi E, Hiba A, Drotár I: Stability Focused Evaluation and Tuning of Special Ground Vehicle Tracking Algorithms, 22nd IFAC World Congress 2023, Yokohama, Japán, 2023. július 9-14.
The video shows the performance of the improved forerunner drone in ZalaZONE Smart City in frame of the SZE part – in cooperation with ELKH Institute for Computer Science and Control – of FT2 “Autonomous Near-Earth Aerial Solutions” subproject in the “Development of innovative
automotive testing and inspection competences in the West-Hungarian region based on the infrastructure of the Zalaegerszeg Automotive Test Track GINOP-2.3. 4-15-2020-00009″ project. The aerial video shows successful tracking of the own (red) vehicle and successful decisions
about the surrounding traffic in three different cases. The slowly approaching and stopping vehicle is safe (green trajectory) while the fast vehicle stopping just in time and the vehicle not stopping are dangerous (red trajectory). The video also shows that a vehicle behind us is considered neutral (light blue) while in front of us it is considered safe (green).