A tavaly őszi sikeres bemutatót (https://jkk-web.sze.hu/dronkutatas-a-szechenyi-egyetemen-
elofutar-dron-vegso-bemutatoja-a-iv-zalazone-innovacios-napon/) és a decemberi konferencia bemutatót (https://www.gyorplusz.hu/gyor/dronok-segithetik-a-rendvedelmi-szervek-kozlekedeset/) követően sem állt meg a munka az „Innovatív járműipari tesztelési és vizsgálati kompetenciák fejlesztése a nyugat-magyarországi régióban a zalaegerszegi Járműipari
Tesztpálya infrastruktúrájára támaszkodva GINOP-2.3.4-15-2020-00009” projekt keretén belül az FT2 „Autonóm földközeli légi megoldások” alprojekt Széchenyi Egyetemen (https://www.uni.sze.hu/ ) az ELKH SZTAKI-val (www.sztaki.hu ) együttműködésben futó szakasza során.
Az őszi-téli hónapokban megtörtént a fejlesztés során gyűjtött felvételek és tapasztalatok feldolgozása és a rendszer jelentős továbbfejlesztése.
A főbb területek:
- Megoldották, hogy a vonuló készenléti egység fedélzetére telepített rendszer kövesse annak útvonalát és küldje fel az új útvonal pontokat a drónnak (eddig a drón fedélzetén történt az útvonal követése a földi jármű pozíciója alapján)
- Átdolgozták a földi járművek pozícióját becslő és a másik jármű veszélyességéről döntő rendszert, ebből a területből megjelent folyóirat cikk született [1]
- Továbbfejlesztették a földi járművet követő robotpilótát, ebből konferencia cikk készült, melyet a jövő héten mutatnak be [2]
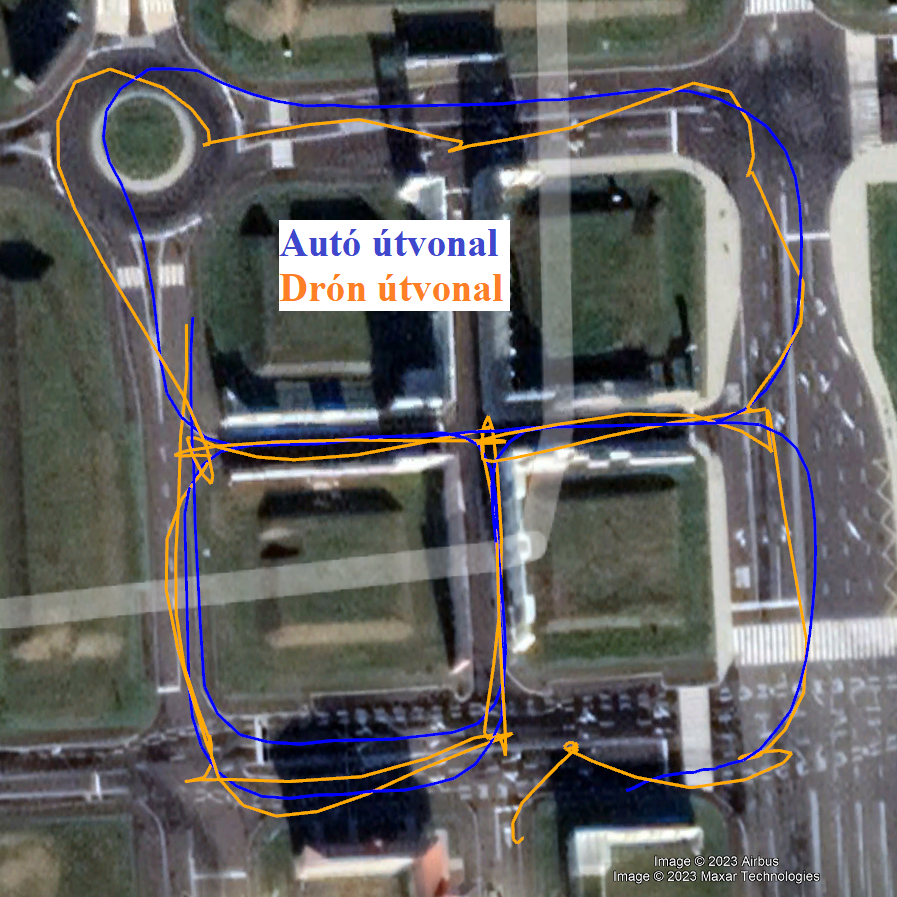
Mindezeket a fejlesztéseket 2023. június 22-23.-án élesben tesztelték a ZalaZONE Smart City modulján. A képen a szabad útvonalon haladó autó követése látható a drónnal, a videó pedig a teljes továbbfejlesztett rendszer működését mutatja a készenléti egységet szimbolizáló jármű követésével és a másik jármű veszélyességéről való döntéssel.
[1] Bauer P, Hiba A, Nagy M, Simonyi E, Kuna G I, Kisari Á, Drotár I, Zarándy Á: Encounter Risk Evaluation with a Forerunner UAV, MDPI REMOTE SENSING Vol. 15 : Issue 6 Paper: 1512 , 45 p. (2023) https://www.mdpi.com/2072-4292/15/6/1512
[2] Bauer P, Nagy M, Kuna G I, Kisari A, Simonyi E, Hiba A, Drotár I: Stability Focused Evaluation and Tuning of Special Ground Vehicle Tracking Algorithms, 22nd IFAC World Congress 2023, Yokohama, Japán, 2023. július 9-14.
A video-n a GINOP-2.3.4-15-2020-00009 projekt FT2 „Autonóm földközeli légi megoldások” alprojektjének a Széchenyi István Egyetemen az ELKH SZTAKI-val együttműködésben készült továbbfejlesztett előfutár drón tesztelése látható a ZalaZONE Smart City-ben. A légi felvétel mutatja, hogy egyrészt a kamerával felszerelt drón sikeresen követi a saját (piros) járművet, másrészt a rendszer képes döntést hozni a közeledő többi járműről három különböző esetben is. A videón látható, hogy első esetben a lassan közeledő, majd megálló járművet veszélytelennek (zöldre színezett pálya), a második és harmadikban azonban az utolsó pillanatban megálló, illetve nem megálló járműveket veszélyesnek (pirosra színezett pálya) minősíti a rendszer. A videón több helyen az is látható, hogy miután mögénk kerül a másik jármű, onnantól semleges (világoskék) minősítést kap, ha elénk, akkor pedig biztonságos (zöld) minősítést.