Kinematic and dynamic modelling of industrial and mobile robots. Computer simulation of robot and computer simulation of robotic environmental factors and the development of simulation-based robot controls.
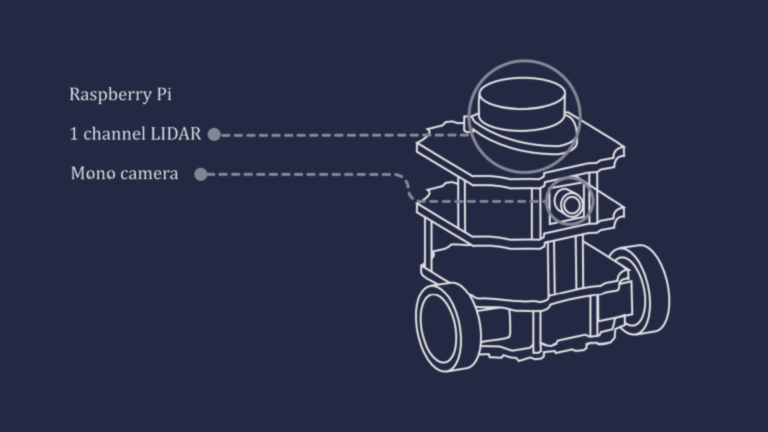
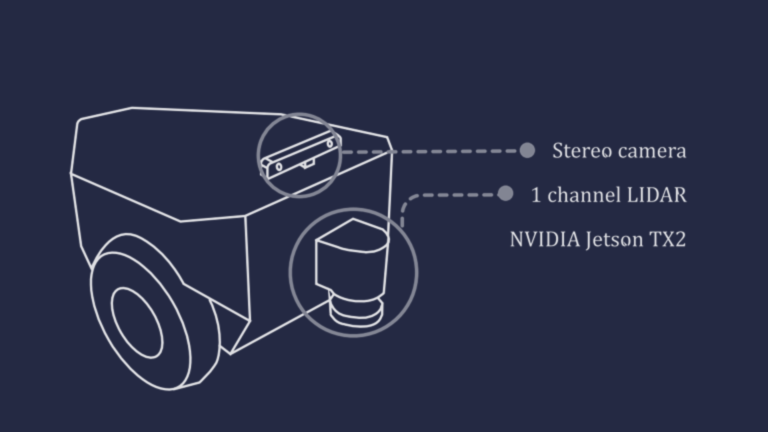
Our researchers develop industrial, autonomous transportation, and cooperative systems. We apply the most recent scientific and technical results of our research field. We focus on developing algorithms and cyber-physical systems that are further usable in industrial digitalization, robotics, and autonomous vehicle control. Our primary research areas are IoT system integration, computer vision, machine-learning-based environment detection methods, and AI-based vehicle control. Furthermore, we also develop ground and aerial robotic and autonomous vehicle models for specific tasks.
Head: Dr. Áron Ballagi
Contact – e-mail address: ballagi@sze.hu
Contact: Rudolf Krecht
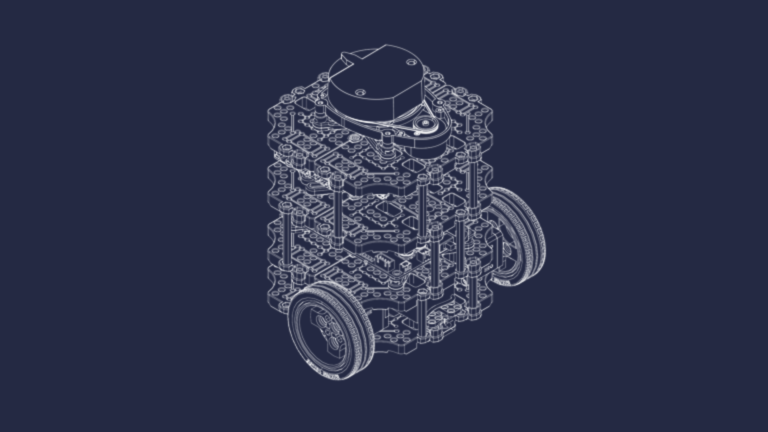
Kinematic and dynamic modelling of industrial and mobile robots. Computer simulation of robot and computer simulation of robotic environmental factors and the development of simulation-based robot controls.
Integration of autonomous mobile robots into manufacturing, warehousing, transport, and other complex environments. The robots are integrated to operate without the need for restructuring the operating environment.
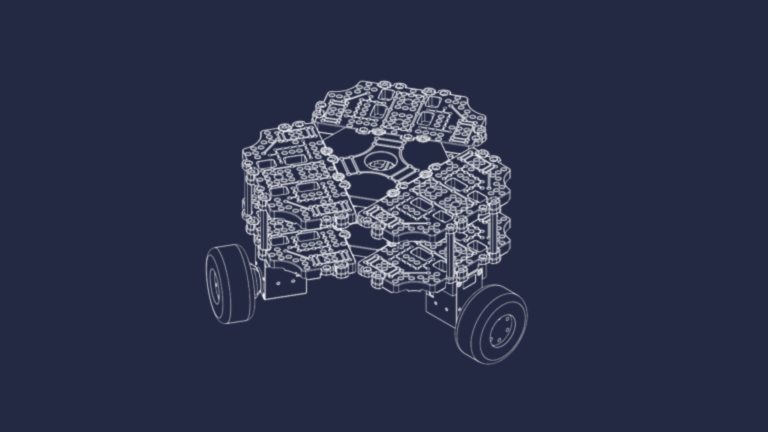
Automation of the logistic systems and the development of autonomous operational-modes. Our research comprises the design and development of complete modular ecosystems, which facilitate communication between interconnected devices.
Development of a mobile robot manipulator for automotive test track construction. This robot autonomously performs road construction subtasks without human intervention, such as painting road markings and placing traffic cones. The development includes the design of the necessary software ecosystem.